How does a PID controller work in InfoSWMM and SWMMM 5 - this also applies to H2OMap SWMM??
double getPIDSetting(struct TAction* a, double dt) // at each time step find the PID control changes for the current time step dt
// Input: a = an action object
// dt = current time step (days)
// Output: returns a new link setting
// Purpose: computes a new setting for a link subject to a PID controller.
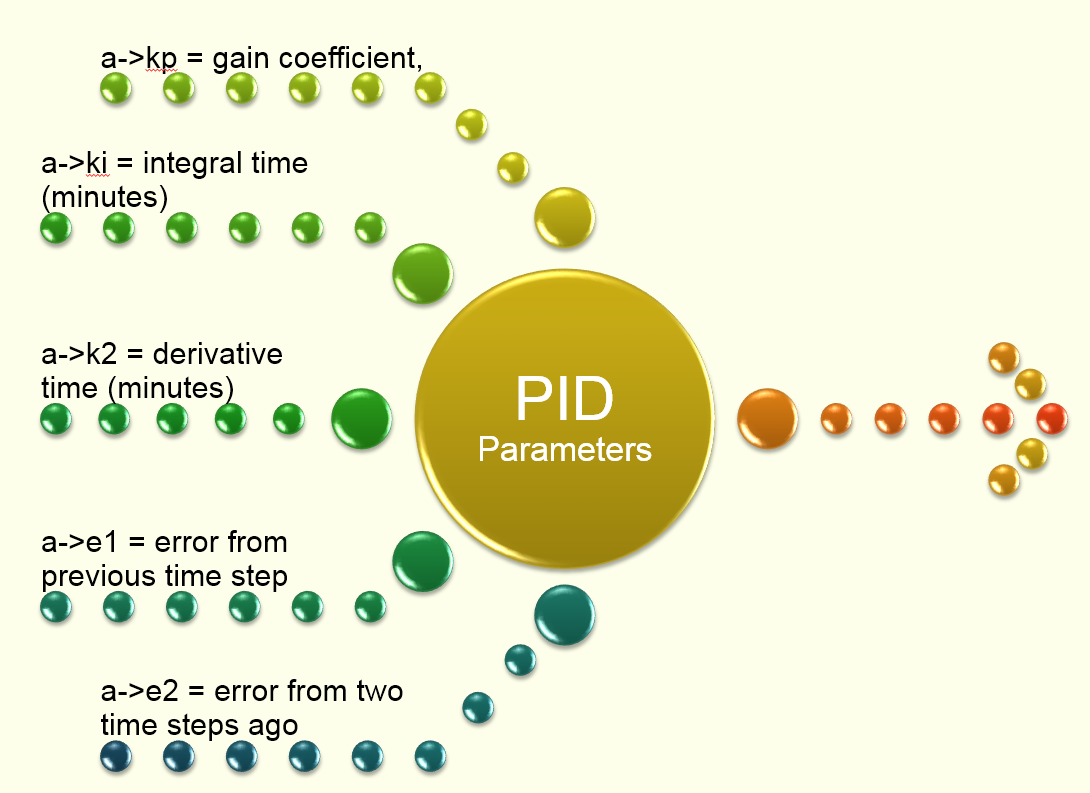
// Note: a->kp = gain coefficient,
// a->ki = integral time (minutes)
// a->k2 = derivative time (minutes)
// a->e1 = error from previous time step
// a->e2 = error from two time steps ago
{
double e0, setting;
double p, i, d, update;
double tolerance = 0.0001;
// Input: a = an action object
// dt = current time step (days)
// Output: returns a new link setting
// Purpose: computes a new setting for a link subject to a PID controller.
// Note: a->kp = gain coefficient,
// a->ki = integral time (minutes)
// a->k2 = derivative time (minutes)
// a->e1 = error from previous time step
// a->e2 = error from two time steps ago
{
double e0, setting;
double p, i, d, update;
double tolerance = 0.0001;
// --- convert time step from days to minutes
dt *= 1440.0;
dt *= 1440.0;
// --- determine relative error in achieving controller set point
// Or how close are we to the set point?

e0 = SetPoint - ControlValue;
if ( fabs(e0) > TINY )
{
if ( SetPoint != 0.0 ) e0 = e0/SetPoint;
// now alter the value of e0

else e0 = e0/ControlValue;
}
// --- reset previous errors to 0 if controller gets stuck
if (fabs(e0 - a->e1) < tolerance)
{
a->e2 = 0.0;
a->e1 = 0.0;
}
if (fabs(e0 - a->e1) < tolerance)
{
a->e2 = 0.0;
a->e1 = 0.0;
}
// --- use the recursive form of the PID controller equation to
// determine the new setting for the controlled link
// determine the new setting for the controlled link
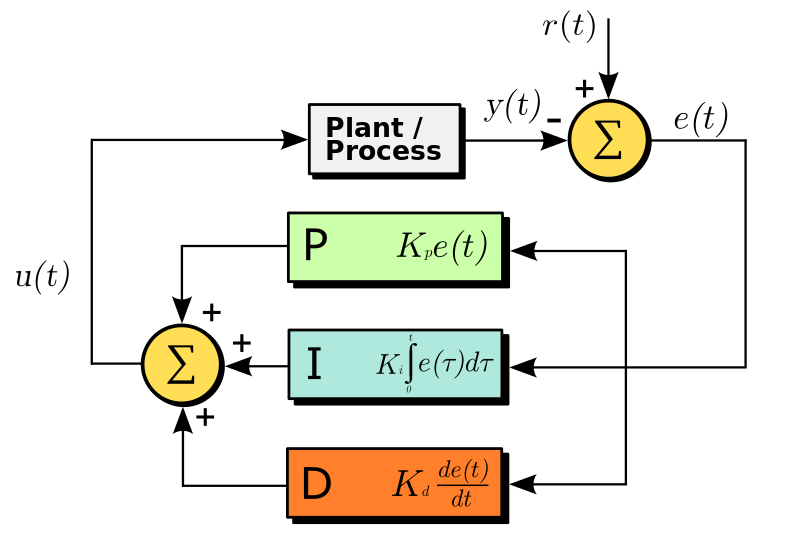
Here is a view of the p, i and d PID internal parameters https://www.wikiwand.com/en/PID_controller
- A block diagram of a PID controller in a feedback loop
p = (e0 - a->e1);

ki, id, kp are user inputs in InfoSWMM and SWMM5 or from the EPA SWMM 5 Help File
if ( a->ki == 0.0 ) i = 0.0;
else i = e0 * dt / a->ki;
else i = e0 * dt / a->ki;

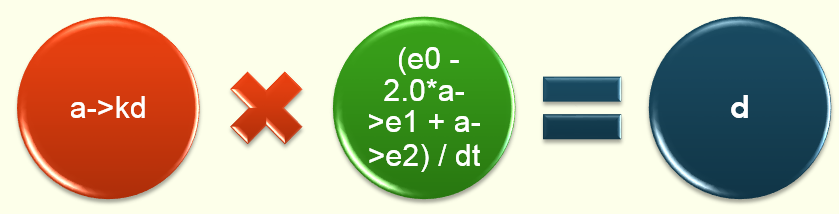
d = a->kd * (e0 - 2.0*a->e1 + a->e2) / dt;
update = a->kp * (p + i + d);
if ( fabs(update) < tolerance ) update = 0.0;
setting = Link[a->link].targetSetting + update;

// --- update previous errors
a->e2 = a->e1;
a->e1 = e0;
a->e2 = a->e1;
a->e1 = e0;
// --- check that new setting lies within feasible limits
// If the link is not a pump then the setting must be between 0 and 1
if ( setting < 0.0 ) setting = 0.0;
if (Link[a->link].type != PUMP && setting > 1.0 ) setting = 1.0;
return setting;}
if ( setting < 0.0 ) setting = 0.0;
if (Link[a->link].type != PUMP && setting > 1.0 ) setting = 1.0;
return setting;}
